Academic Projects at BITS Dubai
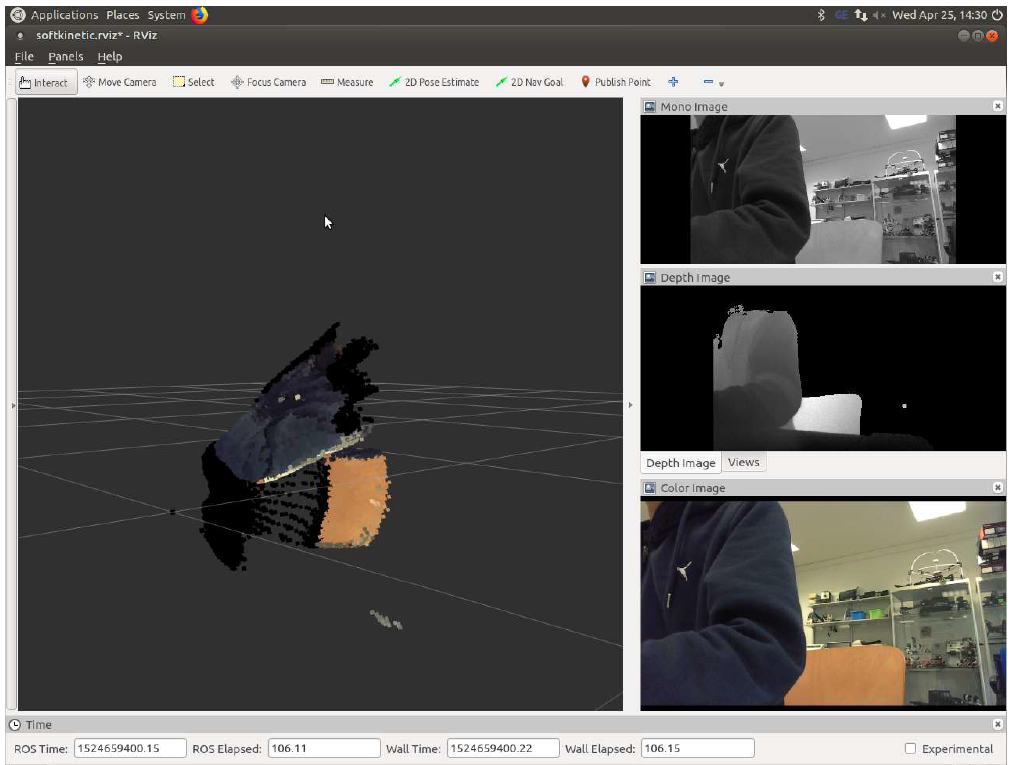
Hand Gesture Control of a Robot using Intelligent Techniques
Bachelor Thesis - Winter 2018
Worked under the guidance of Prof. Dr. Alexander Gepperth at Hochschule Fulda, Fulda, Germany and co-guided by Dr. V. Kalaichelvi. Developed a system to translate free hand gestures to motion instructions on TurtleBot running on Intel Atom. Recognition of free hand gestures were implemented using LSTM networks (TensorFlow using C++). The gestures were then transformed to respective pre-defined motions and parsing the motion instructions via ROS messages to TurtleBot.
Keywords – RNN, LSTM, TensorFlow, SLAM, TurtleBot
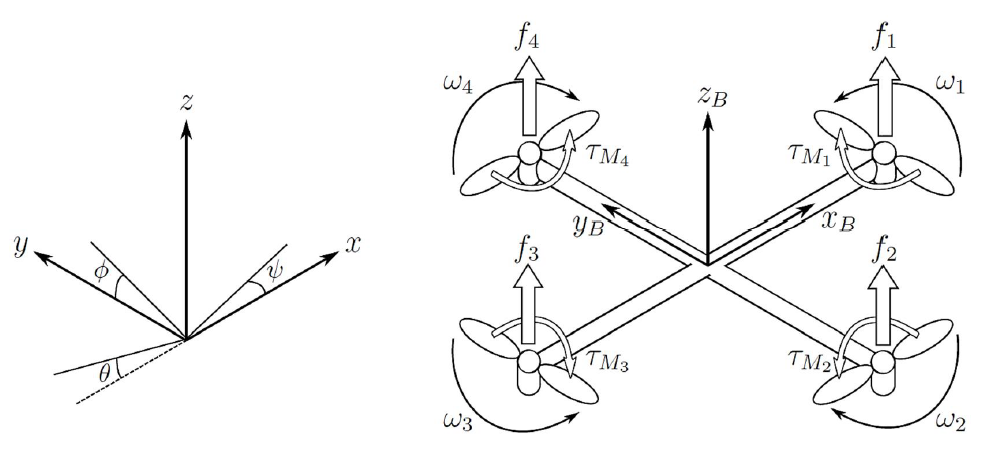
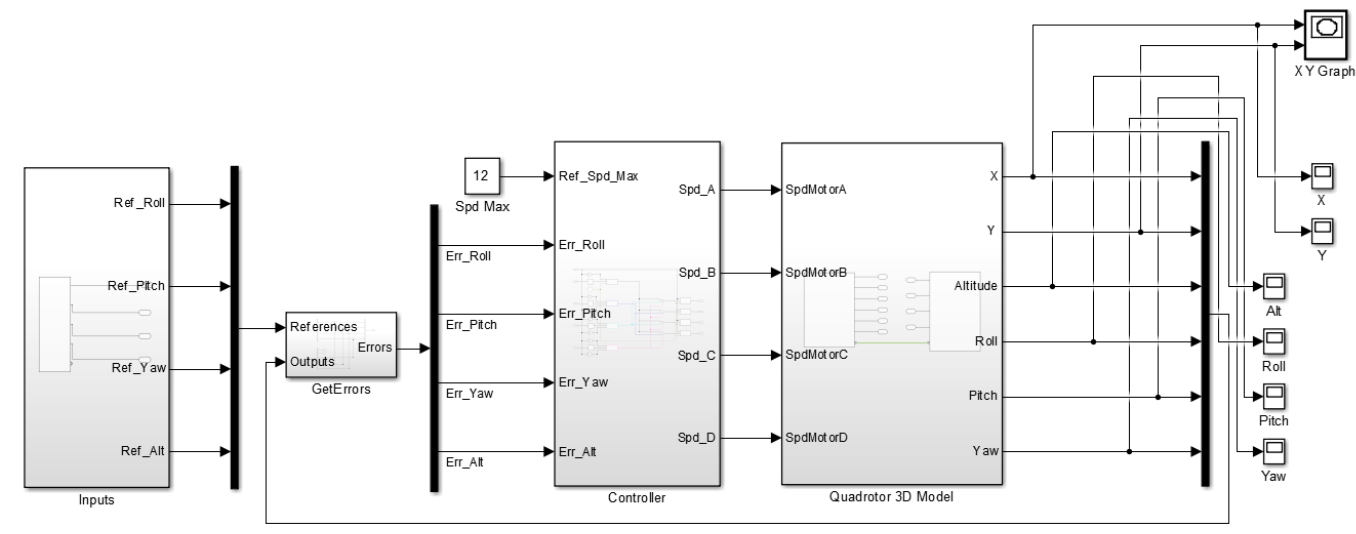
Non-Linear Modelling and Simulation of Unmanned Aerial Vehicle
Design Project - Fall 2017
Worked under the guidance of Dr. Mary Lourde. The first stage involved the study and implementatation of different mechanical models for the nonlinear mathematical modelling of a UAV. The UAV was then simulated in the MATLAB-Simulink environment. Finally a PID controller was designed for controlling the attitude and position of the nonlinear model of the UAV.
Keywords – PID, Non-Linear model, UAV
Indoor Localization of an Unmanned Aerial Vehicle

Design Project - Winter 2017
Worked under the guidance of Dr. Jagadish Nayak. This project involved the design and development of a UAV, spatially aware in an indoor environment devoid of GPS and SLAM algorithms. Main focus was on sensor fusion using the data from LIDAR Rangefinder and Optical Flow for indoor localization.
Keywords – 1D LIDAR, Optical Flow, Pixhawk, UAV
Flight Data Analysis of a Quadrotor
Study Project - Winter 2016
Worked under the guidance of Dr. V. Kalaichelvi. First phase of this project involved the modelling a quadcopter on SolidWorks platform, which was then imported via SimMechanics to MATLAB environment. Finally, a linear controller was designed to control the mechanics of the UAV.
Keywords – PID, UAV, SimMechanics