Academic Projects at University of Michigan
ROB 550: Robotic Systems Lab
Mobile Inverted Pendulum System

This project entailed the conceptualization, design, and realization of a two-wheeled Mobile Inverted Pendulum system. Employing a cascaded control architecture, the robot was stabilized, and operated manually with the aid of a DSM remote, as well as autonomously following pre-defined trajectories.
6-DOF Serial Link Robotic Manipulator
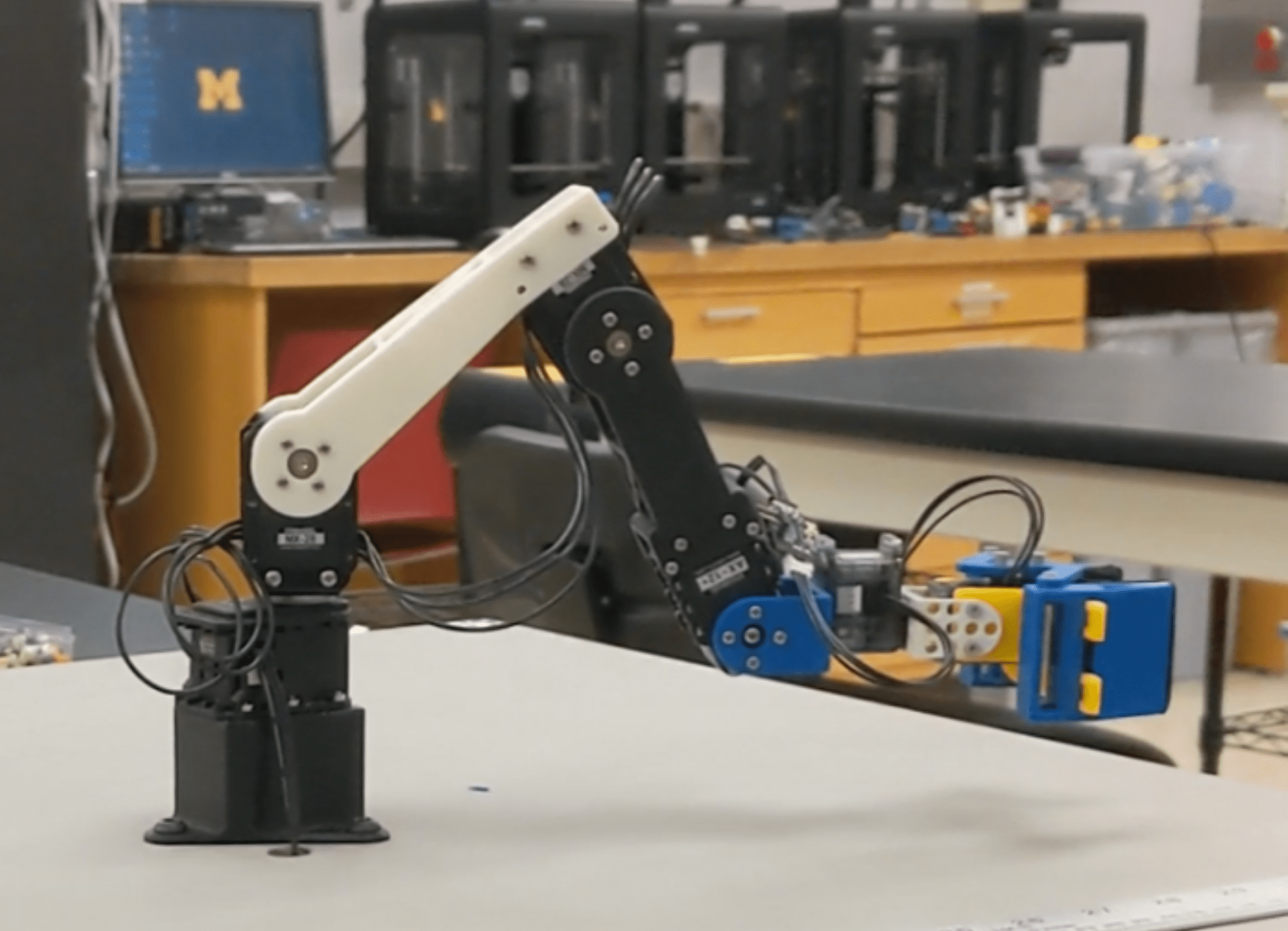
This project entails the design of a manipulator gripper alongside the development of a Python-based codebase for autonomous control of the serially connected motors. The project also integrates the use of a Kinect camera suite consisting of a 3D depth sensor and an RGB camera.
Slam and Path Planning implementation on MBot
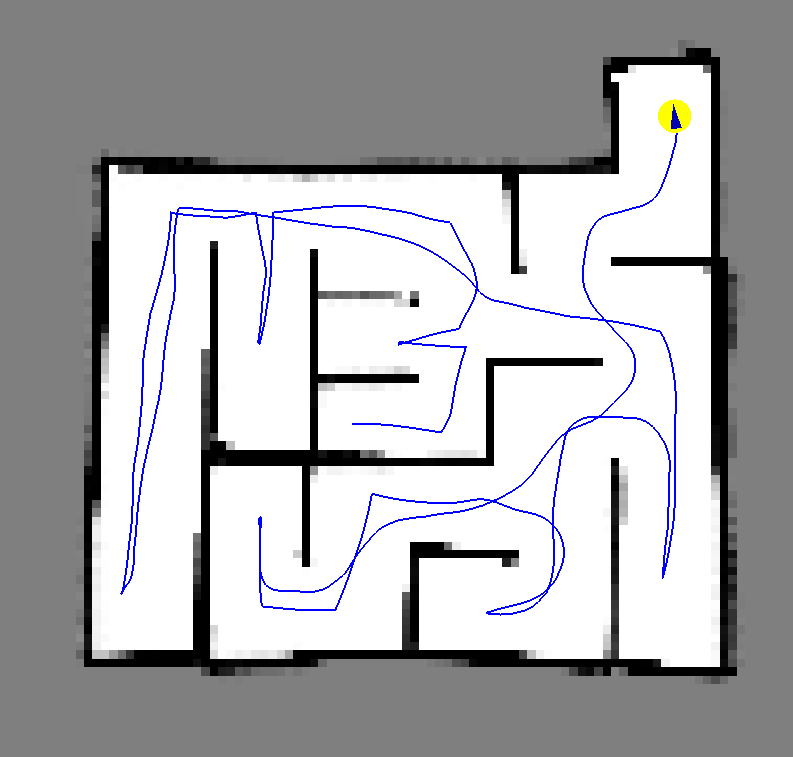
This particular project was intended to be deployed on MBot, a robot designed in-house at the University of Michigan for educational purposes. However, as a result of the COVID-19 pandemic, the implementation was carried out in a simulated PyGame environment.
NA 568: Mobile Robotics
Invariant Extended Kalman Filtering for Robot Localization using IMU and GPS
The objective of this project is to deploy an In-EKF (Invariant-Extended Kalman Filter) based localization system and conduct a comparative analysis against an Extended Kalman Filter based localization system and a GPS-only dataset. The study will leverage the UM North Campus Long-Term Vision and LIDAR dataset, which is a comprehensive autonomy dataset collected for robotics research on the University of Michigan North Campus. The dataset encompasses data from various sensors, including planar lidar, omnidirectional camera, IMU, and GPS, to enable a detailed analysis.
EECA 504: Foundations of Computer Vision
Object Tracking for Safety
This project demonstrates my ability to create practical solutions for real-world challenges through the development of an innovative method to detect moving objects and measure their distance from the camera with precision. The solution utilizes advanced object tracking techniques to accurately estimate object depth and issue proximity warnings. To achieve dependable results, the depth estimator method I developed incorporates cutting-edge scaling algorithms, resulting in precise measurements. This technology has a wide range of potential applications, including aiding in navigation for autonomous vehicles and robots as well as assisting humans in hazardous environments. My expertise in object tracking is showcased through this project, highlighting my capabilities to deliver effective solutions for complex problems.
More to be added ...